

OpenGR is supported on Linux, MacOS and Windows platforms, with continuous testing. The library is now header only, and distributed with a cmake package. Demo applications and tests are also provided
This page reviews the following aspects:
- Build from source: how to install the library, compile the tests and install the applications: here
- CMake package: how to use the library in your own software: here
- a note about compilation mode and performances: here
Compiling the library, applications and tests
For people in a hurry:
Dependencies
OpenGR takes care of its own dependencies, and downloads them when required. As a result, you may need an internet connection for the first compilation.
The libraries and the standalone application require:
- Eigen. The library is automagically downloaded and configured by the cmake process. If you need to force using Eigen from a specific path, call CMAKE with
-DEIGEN3_INCLUDE_DIR=/path/to/eigen.
IO and tests:
- Boost-filesystem (optionnal), used to read dataset folders. Requires Boost version: 1.57 or more.
CMake Options
Our CMake scripts can be configured using the following options:
- Compilation rules
OPTION (OpenGR_COMPILE_TESTS "Enable testing" TRUE)OPTION (OpenGR_COMPILE_APPS "Compile demo applications (including the Super4PCS standalone)" TRUE)OPTION (IO_USE_BOOST "Use boost::filesystem for texture loading" TRUE)OPTION (OpenGR_USE_CHEALPIX "Use Chealpix for orientation filtering (deprecated)" FALSE)We recommend to keep this option toFALSE.
- Advanced functionalities
+OPTION (OpenGR_USE_WEIGHTED_LCP "Use gaussian weights for point samples when computing LCP" FALSE)Was implicitely set toFALSEin previous release.
- Extras
OPTION (DL_DATASETS "Download demo datasets and associated run scripts" FALSE)
- Debug options
OPTION (ENABLE_TIMING "Enable computation time recording" FALSE)
Options can be set by calling cmake -DMY_OPTION=TRUE, or by editing the file CMakeList.txt (not recommended).
Compilation targets
Our CMAKE scripts provide several targets:
all: build the libraries and the demos, if enabled withOpenGR_COMPILE_APPS,install: build and install the libraries, the cmake package, and if requested the demo applications. This is recommended target. It can be customized by calling cmake with-DCMAKE_INSTALL_PREFIX=your_path.OpenGR-PCLWrapper/Super4PCS: build the demos application,buildtests: compile tests. This target is generated only ifOpenGR_COMPILE_TESTSoption is set toTRUE,test: run the tests locallydoc: run doxygen to compile the documentationdl-datasets: download the demo datasets.
Installed directories structure:
After compilation and installation, you should obtain the following structure:
Linux and MacOS Builds
Nothing specific here, just follow the aforementionned instructions.
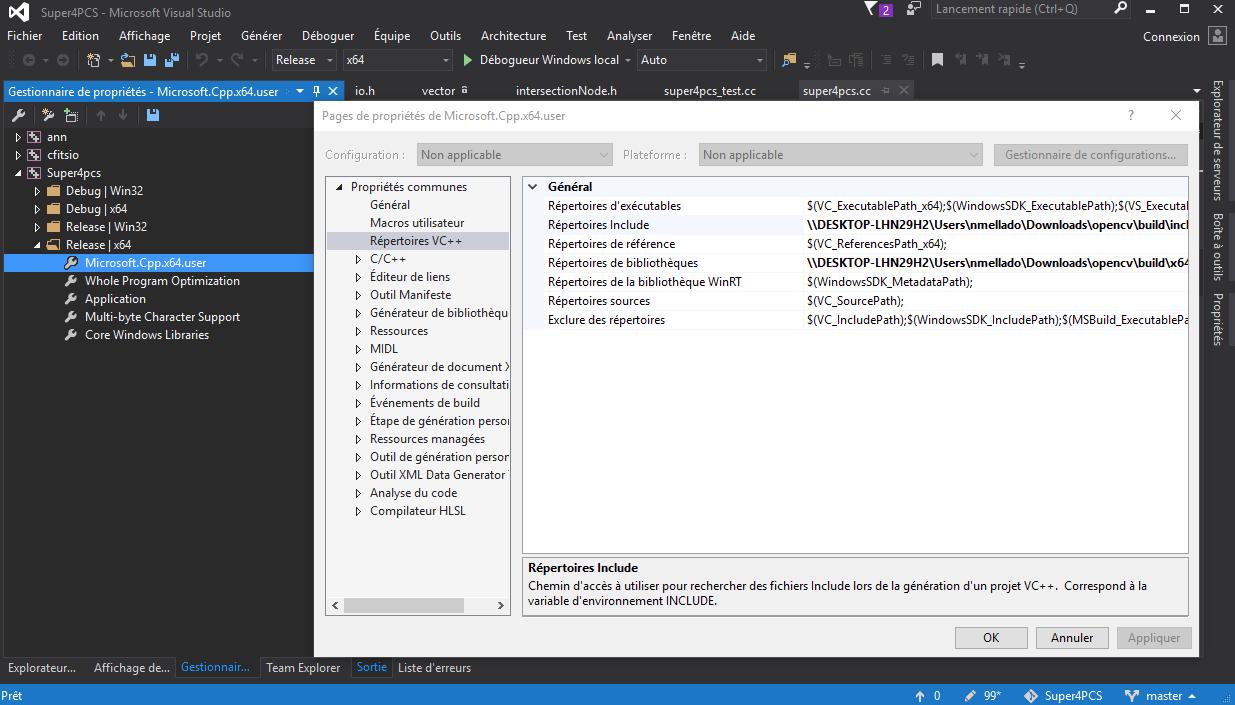
Windows Builds
OpenGR requires c++11 features and CMake support. We recommend to use Microsoft Visual Studio 2019 (2017 should also work) with CMake support. CMake standalone is also supported (and used for Continuous Integration on AppVeyor), but not recommended.
By default, the project can be opened and compiled straight away with no parameter setting.
If you want to compile with Boost support, the dependency directories must be properly configured in Visual Studio. They can be set either when calling CMake or globally by configuring Visual Studio (see how-to here).
Use OpenGR library in your own application
Using cmake
From release v.1.2, OpenGR is now header-only, and provides a CMake package generated during the installation process. The target namespace is gr.
To use it in your own application, add the following lines to your project file:
In addition, CMake must be ran so that CMAKE_PREFIX_PATH contains OpenGR_install_dir/lib/cmake when compiling OpenGR-externalAppTest.
OpenGR files will be located in the gr folder. For instance, to use the Super4PCS algorithm:
This functionality is tested by our continuous integration system. Checkout the externalAppTest for a working example.
Using in ROS (Robot Operating System)
OpenGR includes a catkin package files to simplify use in ROS.
Debug mode and performances
Note that we heavily use template mechanisms that requires to enable inlining in order to be efficient. Compiling in Debug mode without inlining may result in longer running time than expected.
